![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Research - Motivation
![]()
![]()
![]()
Motivation
The methodology of locomotion has undergone dramatic change with the advancement of human civilization. During the last two centuries, various remarkable modern transportation methods, including wheeled and track vehicles, airplanes, were invented based on the discovered physical principles and designed to adapt to a specific environment. However, development of vehicles that are capable of passage over natural rough terrains remains primitive. Are humans sufficiently clever to invent a new machine to serve this purpose using presently known design theories and methodologies? Perhaps, but I am more inclined to believe that a systematic and incremental approach building on learning the lessons from nature offers a more likely path.
Animals provide an ideal inspiration to the legged robotic world. After millions of years of evolution, animals have developed high complex degree-of-freedom (DOF) systems yet perform great mobility that is unparallel to the existing robotic machines. Though animals’ appearances and structures may vary significantly, for similar behaviors, for example, running, they seem to share a few similar fundamental motion patterns which can be represented by simple low-DOF spring-damper-mass models (“templates”). Recent-developed bio-inspired legged machines such as RHex and iSprawl whose running motion can be represented in the similar model as in animals indeed have begun to exhibit a much greater mobility. Of course nature has its own mechanism for evolution and formats animals into high-DOF systems after generations---reflecting most likely the necessity of performing a wide diversity of behaviors to ensure survival? Probably true. No matter what the answer is, this concept opens a new challenge yet fundamental question: How to systematically design and control a robot (or a general physical dynamic system) based on a bio-inspired model or even multi-models? I believe (1) systematically learning from the biological design and behavior offers solid concept and intuition of dynamic locomotion. (2) Analyzing a particular behavior by assigning it a distinguished, simple model opens the gateway to truly understand the essence of design and control of each particular constituent of the larger behavioral suite. (3) With right composition of multi templates where each presents a unique behavior, this approach to research promises the capability in the long run to design and control a much more complex high-mobility system capable of performing multi agile behaviors and responding to diverse nature environments.
I have no doubt that someday the legged machines will become one of human’s major transportation methods as “car” was invented as wheeled human-carrier 100 years ago. However, it is a challenge task even for a small-size robust and agile legged machine to achieve the modest capabilities that would entitle use to call it a “robot”.
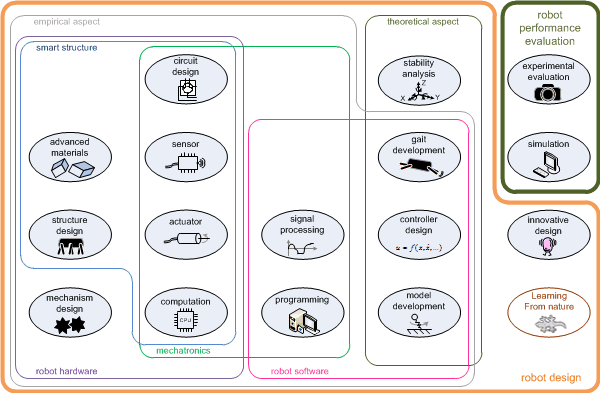
Research Focus
My research activities and interests lie in the understanding/improvement of performance/behavior of bio-inspired legged machines (short-term) and general physical dynamic systems (long-term) from two aspects: design and control. Design with the appropriate morphology and materials (“form”) forms the substrate on which system performance can be elicited by appropriately matched control (“function”).