![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Research - RHex
![]()
![]()
![]()
![]()
![]()
![]()
 RHex, Robot hexapod, was the primary platform I used for my Ph.D. research.
This project was a 5-year multi-school
interdisciplinary legged robotic project funded by the US Department of
Defense Advanced Research Projects Agency (DARPA). Principle investigators included
Prof. D. E.
Koditschek at University of Michigan (relocated to University of
Pennsylvania), Prof.
R. J. Full at UC-Berkeley, Prof.
M. Buehler at McGill University, Canada ( relocated to Boston Dynamics),
and Prof. A. Rizzi
at Carnegie Mellon University.
RHex, Robot hexapod, was the primary platform I used for my Ph.D. research.
This project was a 5-year multi-school
interdisciplinary legged robotic project funded by the US Department of
Defense Advanced Research Projects Agency (DARPA). Principle investigators included
Prof. D. E.
Koditschek at University of Michigan (relocated to University of
Pennsylvania), Prof.
R. J. Full at UC-Berkeley, Prof.
M. Buehler at McGill University, Canada ( relocated to Boston Dynamics),
and Prof. A. Rizzi
at Carnegie Mellon University.
Robot RHex has only one
active motor-driven rotational degree of freedom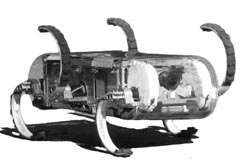 (DOF)
per leg and 1-or-2 DOF passive DOF based on leg compliance depended on the leg
type. Low
active DOFs improve robustness and reliability in the sense of both design and
control, and the compliant legs provide the well-defined interface for exciting dynamic behaviors of
robot locomotion (i.e. with potential and kinetic energy exchange during locomotion).
(DOF)
per leg and 1-or-2 DOF passive DOF based on leg compliance depended on the leg
type. Low
active DOFs improve robustness and reliability in the sense of both design and
control, and the compliant legs provide the well-defined interface for exciting dynamic behaviors of
robot locomotion (i.e. with potential and kinetic energy exchange during locomotion).
You may visit the following website for more detailed information: http://www.rhex.net.
Some RHex movies:
|
Fractal - roach (mpg, 3.7MB)
|
Fractal - RHex (mpg, 1.2MB)
|
|
|
|
|
Running (mpg, 4.6MB)
|
Jogging (mpg, 6.5MB)
|
|
|
|
|
Tumble (mpg, 3.0MB)
|
Uneven Terrain (mpg, 4.7MB)
|
|
|
|
|
Stair Climbing (mpg, 2.1MB)
|
Incline (mpg, 4.6MB)
|
|
|
|
|
Flipping (mpg, 6.5MB)
|
Aqua RHex (mpg, 4.4MB)
|
|
|
|
|
Biped Mode (mpg, 2.8MB)
|
RHex vs. Dog (mov, 0.8MB)
|
|
|
|
|
|
|